La naturaleza es la principal fuente de inspiración para muchos sistemas robóticos existentes, diseñados para replicar la apariencia y el comportamiento de varios organismos vivos. Al reproducir artificialmente procesos biológicos, estos robots pueden ayudar a abordar problemas complejos del mundo real de manera más efectiva.
Investigadores de la Universidad de Ciencia y Tecnología de Zhejiang y la Universidad de Essex desarrollaron un robot inspirado en el camarón mantis que podría ayudar a explorar y monitorear ambientes submarinos estrechos habitados por numerosas especies animales y ricos en recursos minerales. Este robot bioinspirado se presentó en un artículo publicado en IEEE/ASME Transactions on Mechatronics .
“Muchos entornos submarinos tienen espacios estrechos de difícil acceso para los humanos, por lo que sería óptimo que los robots se hicieran cargo de su exploración”, dijo a Tech Xplore Gang Chen, uno de los autores del artículo. “El camarón mantis es un pequeño depredador flexible y que nada rápidamente en el ambiente marino, y su excelente capacidad de movimiento puede proporcionar nuevas ideas de investigación para el desarrollo de robots submarinos. Este trabajo toma el camarón mantis como objeto biónico, diseña un nuevo robot de camarón mantis, y completa su control de movimiento.”
Inspirados por las habilidades y movimientos del camarón mantis, Chen y sus colegas se propusieron replicarlos artificialmente. Su esperanza era desarrollar un robot submarino que pudiera moverse notablemente bien bajo el agua, imitando los mecanismos que apoyan los movimientos de la gamba mantis y, por lo tanto, también accediendo fácilmente a espacios estrechos bajo el agua.
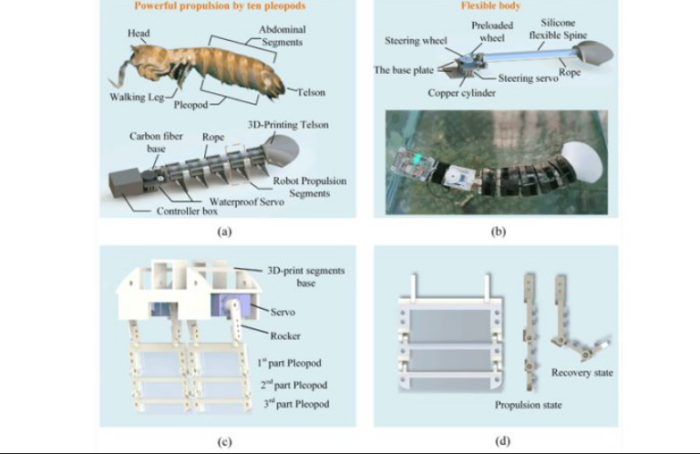
El ágil robot creado por los investigadores, compuesto por 10 pleópodos artificiales y un cuerpo flexible, tiene una gran capacidad de propulsión. Los pleópodos son extremidades en forma de horquilla adheridas al cuerpo de los crustáceos, que les permiten moverse en el agua.
“El robot biónico del camarón mantis es impulsado por cinco pares de pleópodos”, explicó Chen. “Se puede lograr un equilibrio de velocidad y estabilidad ajustando la frecuencia del movimiento, la amplitud y la diferencia de fase del movimiento de estos cinco pares de pleópodos. Además, la conexión de cada par de pleópodos es independiente, lo cual es muy útil para reparar en caso de daños estructurales bajo el agua.”
Los movimientos del robot del equipo se controlan mediante la flexión de su torso flexible mediante un cable, junto con el movimiento de sus pleópodos artificiales. En conjunto, estos mecanismos permiten que el robot ajuste rápidamente el ángulo en el que gira, de modo que pueda nadar en la dirección deseada.
“Los múltiples pleópodos son redundantes, lo que puede permitir que el robot gire incluso cuando algunos de los pleópodos fallan”, dijo Chen. “El pleópodo biónico está diseñado con tres articulaciones, una de las cuales es una articulación activa impulsada por un servomotor y las dos restantes son articulaciones pasivas, que utilizan la resistencia del agua para lograr su despliegue y plegado”.
Básicamente, cuando una de las extremidades del robot se mueve hacia atrás, sus tres articulaciones se expanden por completo, lo que lleva a la máxima propulsión. Por el contrario, cuando la extremidad vuelve a su posición original, las articulaciones se pliegan, reduciendo la resistencia hacia adelante. Este diseño único aprovecha las características asociadas con el flujo de agua para simplificar la estructura del robot, aumentar su capacidad de propulsión y facilitar su control bajo el agua.
“La estructura general del robot biónico de camarón mantis se refiere a la estructura biológica del camarón mantis y el cuerpo del robot es plano con un telson aerodinámico para reducir efectivamente la resistencia”, dijo Chen. “El pleópodo y el cuerpo del robot adoptan un diseño de acoplamiento rígido-flexible para reducir el impacto del agua en el robot y mejorar la estabilidad del robot en movimiento bajo el agua”.
Los investigadores probaron un prototipo de su robot camarón mantis y descubrieron que podía moverse bien bajo el agua, alcanzando una velocidad máxima de 0,28 m/s y un radio de giro mínimo de 0,36 m. Estos resultados resaltan el potencial del robot para afrontar misiones de exploración en entornos submarinos estrechos y complejos.
En particular, tanto la velocidad como los movimientos del robot de la gamba mantis se pueden controlar de forma precisa y sencilla, lo que reduce el riesgo de colisiones con obstáculos submarinos. Los investigadores ahora planean seguir desarrollando su sistema, con la esperanza de que eventualmente se utilice para monitorear y rescatar ambientes marinos.
“En el futuro, nos centraremos en cómo realizar el movimiento autónomo del robot biónico del camarón mantis en un entorno submarino estrecho para completar la tarea de detección en este entorno”, dijo Chen.
“Planeamos optimizar la estructura, la forma y el diseño del sistema de hardware del robot para mejorar su capacidad de movimiento de seis grados de libertad en el espacio 3D y una mayor velocidad de movimiento bajo el agua. Luego, la IMU, la cámara, el sensor de profundidad y otros Los dispositivos de adquisición de información se incrementarán para lograr un control de movimiento de circuito cerrado más preciso del robot mediante el análisis de la información ambiental y el ajuste de retroalimentación de su propia postura”.
Si bien el robot del equipo ya logró resultados alentadores, todavía se encuentra en una etapa temprana de desarrollo. Chen y sus colegas ahora continuarán mejorando y probando su robot para determinar su capacidad para navegar en entornos submarinos reducidos.
“En nuestros próximos estudios, también mejoraremos la durabilidad y confiabilidad de cada uno de los componentes del robot, utilizando fibra de carbono y materiales integrados de alta resistencia”, añadió Chen. “Esto podría sentar las bases para aplicaciones prácticas en entornos submarinos confinados”.
techxplore.com